|
||||||
|
||||||
ROBOTICA
video
immagini
papers
progettati
costruiti
toolbox
vrml
simulatori
Documents
meccanica
sistemi
elab.immagini
realtà virtuale
biomeccanica
esapodi
formula1
intelligenza
[Ikaro] - [Jupiter] - [Zeus] - [Sguardone] - [Sacrista]
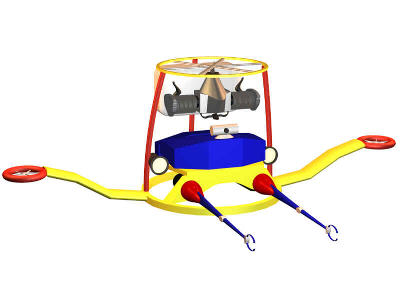
Robot FreeFlying - "IkarO"
Analisi funzionale
La macchina è applicabile negli interventi a distanza e di assistenza aerea (operazioni in zone ad alto rischio o di difficile raggiungimento; controllo e manutenzione delle linee aeree, teleferiche, tralicci, etc). Range di azione illimitato, posizionamento GPS e piattaforma inerziale. Telecontrollo a radiocomando, feedback visivo e telemetrico Descrizione generale
- Il robot è una macchina free flying mossa da un doppio rotore principale e stabilizzata da due rotori laterali.
- Dotato di due braccia indipendenti.
- Telecamera e sistema di illuminazione.
- Controllo del posizionamento GPS.
Analisi della soluzione
- Macchina naturalmente autoequilibrante, i rotori laterali compensano l'eccentricità del carico.
- Ingombro contenuto nelle fasi di volo.
- Interfaccia esterna di telecontrollo multicanale e shutdown di emergenza.
- Peso contenuto: eliminazione sistemi di anticipazione e ridondanza del controllo.
Sistemi a bordo
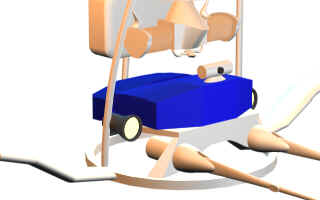
Telaio
I piantoni e l'anello superiore realizzati in lega di alluminio, l'anello inferiore in acciaio legato ad alta tenacità. Il telaio regge i supporti di: motore, serbatoio, batterie, hw controllo, sistema GPS, motori e braccia.
Motore rotore principale e pale
E' un bicilindrico contrapposto a combustione interna, brucia una miscela di alcool e olio di ricino (il serbatoio ha un'autonomia di 25'(35' di volo). Raffreddato ad aria viene carburato manualmente all'avvio. Comanda la rotazione contrapposta di due rotori coassiali che raddoppiano in questo modo la spinta di sostentamento e assicurano la neutralità delle coppie d'inerzia. Il basso rendimento della trasmissione interna al motore permette al rotore di raggiungere un regime di autorotazione in caso di mancata coppia durante una fase di volo e quindi di autoindurre la macchina ad una planata lenta per evitare impatti violenti al suolo.
Rotori laterali
I rotori laterali sono movimentati con brushless e cinghia e hanno la possibilità di orientare la propria spinta o simmetricamente rispetto al carico o eccentricamente in modo da garantire l'equilibramento della macchina anche in caso di configurazioni che non lo sono naturalmente.
Braccia e motori elettrici
Due braccia antropomorfe a 6gdl realizzate da due sezioni coniche, la mano è una pinza parallela capace di afferrare oggetti cilindrici. I motori degli assi 1 sono montati sul telaio, gli altri assi hanno motori sul giunto. Movimenti: con riduttore di giri sulla spalla e con coppie coniche sui giunti.
Processore
Ogni microprocessore del calcolatore di controllo è alimentato a +5V DC dalle batterie di bordo e ha sia RAM che EEPROM integrate. Il BUS dati a 32bit permette il collegamento con i sensori, l'apparato RF, il clock e il GPS. Il collegamento con le interfaccie esterne viene gestito dal sistema Radio Frequencies attraverso una trasmissione dati a 9600 bps.
Sensori
Il robot è equipaggiato di: sonar altimetro, Global Position System, sensore di velocità relativa con l'aria e sensori di contatto con il suolo, con i rotori laterali e con gli end effectors. Tutti gli apparati comunicano le grandezze digitali al processore di controllo con una frequenza di almeno due volte al secondo.
Sistemi esterni
Terminali remoti
Due personal computer equipaggiati con le schede di collegamento RF vengono utilizzati per gestire e monitorare la telemetria del robot durante le fasi di volo, per manipolare le braccia e per acquisire le immagini dalla telecamera.
Arresto di emergenza
Un sistema meccanico garantisce un blocco in caso di emergenza, sia da terminale di controllo che da radiocomando dedicato è possibile chiudere il carburatore del motore principale e aprire l'alimentazione dei motori elettrici. Un apparato diagnostico a bordo rileva l'avvenuto arresto e ne segnala l'eventuale fallimento continuando ad inviare il segnale di cut off.
Controllo remoto alternativo
In caso di malfunzionamento di uno dei sistemi di controllo a bordo la macchina è equipaggiata con un sistema di controllo radio del motore principale e dei rotori laterali di tipo a servocomandi direttamente pilotabili da un radiocomando per elicotteri in modo da garantire il recupero del robot anche in caso di solo parziale malfunzionamento.
Manovrabilità
La macchina in posizione di trasferimento è naturalmente neutra. Il massimo carico utile non deve essere superiore alla spinta del rotore principale, i rotori laterali assicurano solo la stabilità al rollio e al beccheggio. Ha una massima velocità di avanzamento di 6 m/s e una velocità di arretramento ridotta rispetto alla massima. La velocità di salita di 1 m/s è associata alla notevole stabilità in hovering garantita dal doppio rotore.
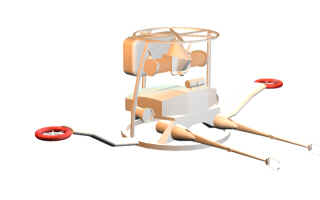
Video
Overview macchina