|
||||||
|
||||||
DOCUMENTS
elab.immagini
galileo
orgoglio
realtà virtuale
vrml
biomeccanica
esapodi
formula1
intelligenza
takoma
Papers
meccanica
sistemi
robotica
Parte 1 - Parte 2 - Parte 3 - Parte 4 - Parte 5 - Parte 6 - Parte 7
Uno, Due, ...Camminare!
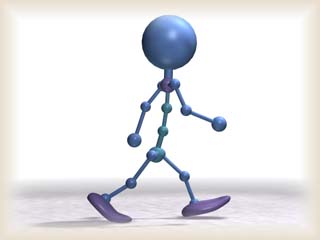
L’attività di camminamento richiede un particolare controllo neuromotorio che artificialmente è molto complesso ricostruire. La dinamica del singolo arto, essendo una struttura a cinematica aperta, diventa simile a quella di un tri-pendolo inverso: i tre segmenti uniti da caviglia, ginocchio e anca formano una costruzione in equilibrio sul piede alla quale il nostro controllo garantisce in ogni momento la stabilità.
La stabilità dinamica del bipede (a differenza dei quadrupedi e degli esapodi che sono intrinsecamente stabili) è fondamentale per il camminamento ed è realizzata usando le masse e le accelerazioni di tutto quanto il corpo.
Non solo i piedi devono muoversi rispetto al suolo ma anche il bacino, la spina dorsale, le braccia e la testa si devono muovere in sincronismo per mantenere il bilanciamento del sistema. Sebbene complessi questi movimenti si possono analizzare separatamente in modo da evidenziare la meccanica del camminamento.
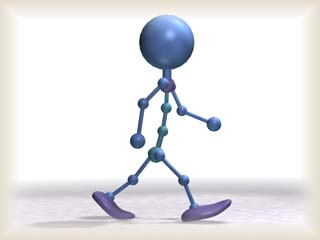
Durante il camminamento i piedi, e quindi le gambe, spingono il corpo in avanti. Una camminata naturale prevede che ogni giunto rimanga leggermente flesso, anche quando la gamba raggiunge la sua massima estensione. Il passo inizia con entrambi i piedi nella posizione di contatto, questo è il punto nel quale il peso si sposta in avanti per generare l'avanzamento e viene sopportato dal piede davanti.
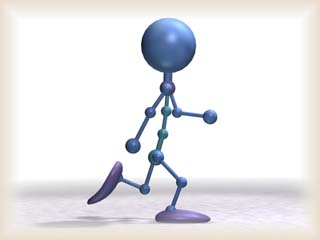
Appena il peso del corpo si trasferisce sul piede davanti, il ginocchio si flette per assorbire lo sforzo. Questa è la posizione nella quale il baricentro del corpo raggiunge il punto più basso della sua traiettoria durante il camminamento. L'energia potenziale persa durante questa fase viene accumulata sotto forma di energia cineteca nelle diverse sezioni del corpo, così da essere restituita durante la successiva fase.
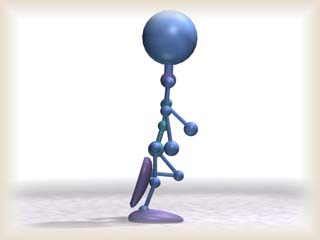
Questo è il primo quarto del ciclo: mentre il corpo si sposta in avanti, il ginocchio si raddrizza ed eleva il corpo fino al punto più alto che il baricentro raggiunge durante la camminata. Questa è chiamata la posizione di passaggio perché è quella nella quale il piede libero oltrepassa la gamba di supporto.
Il piede che sorregge il peso alza il tallone dal suolo mantenendo quindi solo un ristretto contatto sulla punta, insufficiente a generare una pressione di equilibrio anche per via del fatto che l’avanzamento del corpo ha spostato il peso oltre la gamba di appoggio. Il corpo inizia quindi a cadere in avanti e il piede che effettua la corsa di ritorno ruota come un pendolo per prepararsi a colpire il suolo.
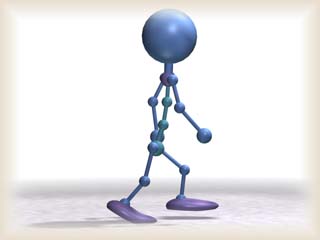
La gamba libera entra quindi in contatto esattamente a metà del ciclo di camminamento. La seconda metà sarà poi perfettamente simmetrica alla prima, eventuali differenze risulterebbero in uno zoppicamento durante il passo.
Il centro di massa del corpo può essere molto prossimo ai fianchi e tutto il bilanciamento durante la camminata si basa su questa disposizione. Durante il passo si può osservare un moto assoluto del bacino separabile in due distinti spostamenti.
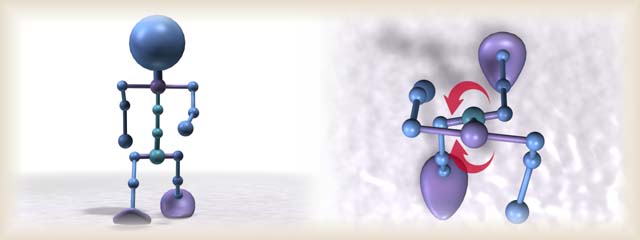
Durante l’esecuzione del primo passo si osserva una rotazione del bacino lungo l’asse della colonna spinale in avanti e all’indietro insieme alle gambe. Se, ad esempio, la gamba destra è davanti allora la parte destra del bacino ruota rispetto all’asse del corpo in modo da portarsi in avanti. Per questo quando la gamba raggiunge la sua completa estensione anche il bacino è al massimo grado di rotazione. Per mantenere il bilanciamento le spalle devono oscillare nella direzione opposta. In questa fase le spina dorsale rimane relativamente diritta, ovvero non si flette.
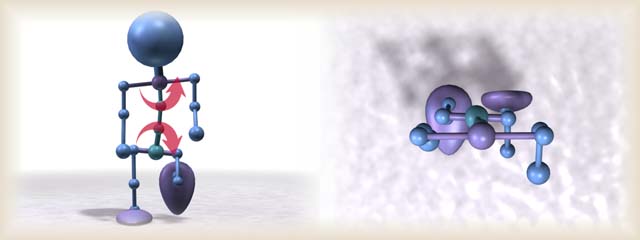
Una seconda rotazione avviene invece in corrispondenza della posizione di passaggio: la gamba di appoggio produce un innalzamento relativo della sua estremità di bacino, forzando così una flessione anche della spina dorsale. Il movimento simmetrico della colonna vertebrale produce nelle spalle una contro rotazione che è speculare a quella del bacino in modo da mantenere in ogni momento l’equilibrio del centro di massa.
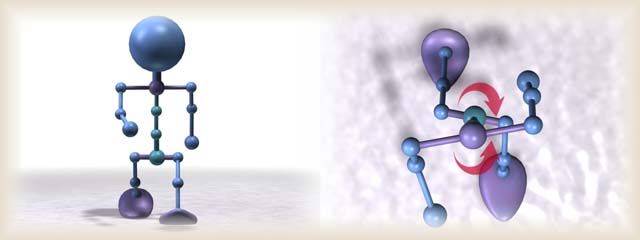
Nell’estensione della seconda gamba spalle e bacino ritornano ad essere paralleli. L’avanzamento dell’anca produce però una nuova rotazione del bacino intorno all’asse vertebrale e quindi anche una nuova contro oscillazione nel segmento delle spalle. Naturalmente nella determinazione e nel mantenimento dell’equilibrio concorrono anche tutte le altri parti del corpo a partire dalle braccia, normalmente utilizzate come appendici di correzione dell’equilibrio dinamico sulla base delle retroazioni sensoriali di accelerazione, fino alla testa, anche se questa, essendo spesso coinvolta nella pianificazione della traiettoria (posizionamento oculare sull’obiettivo), normalmente non ha ruolo rilevante nell’equilibrio umano.
Parte 1 - Parte 2 - Parte 3 - Parte 4 - Parte 5 - Parte 6 - Parte 7

